RL in Practice
Getting Started with Gym and Stable-Baselines3
Teaser
Explosive motions with RL
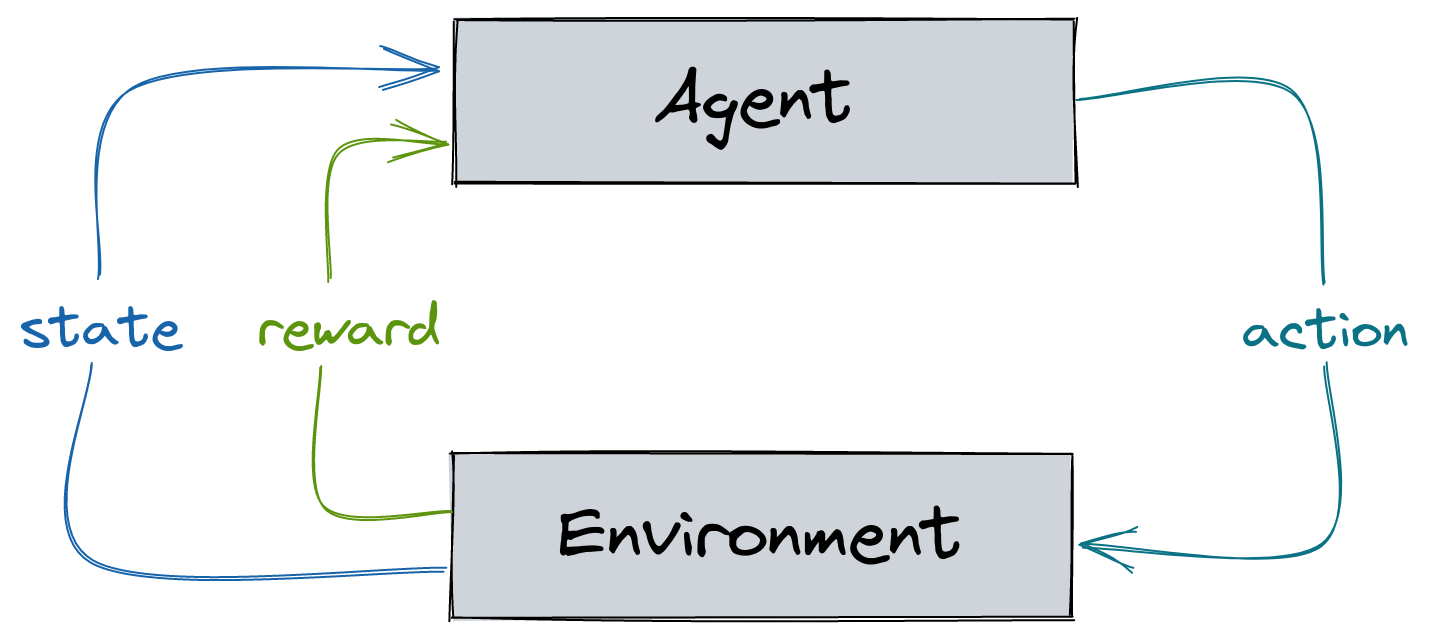
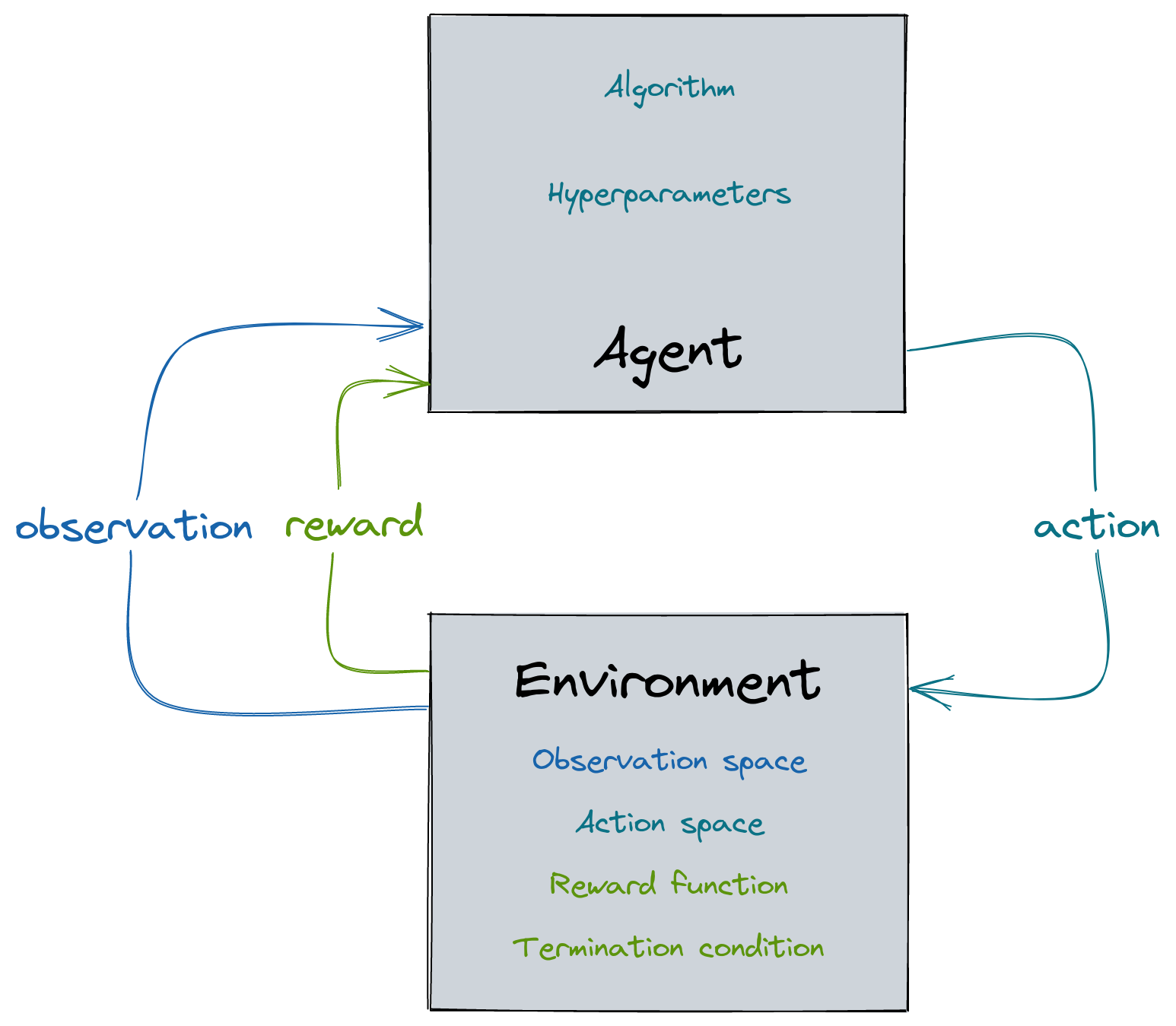
Reinforcement Learning 101
Today Tutorial
Outline
- What is Gym?
- RL on a custom task
- Getting started with Stable-Baselines3
What is Gym? (1/2)
An API
import gym
# Create the environment
env = gym.make("CartPole-v1")
# Reset env and get first observation
obs = env.reset()
# Step in the env with random actions
# and display the env
for _ in range(100):
# Display the env
env.render(mode="human")
action = env.action_space.sample()
# Retrieve new observation, reward, termination signal
# and additional infos
obs, reward, done, info = env.step(action)
# End of an episode
if done:
obs = env.reset()
Live Demo
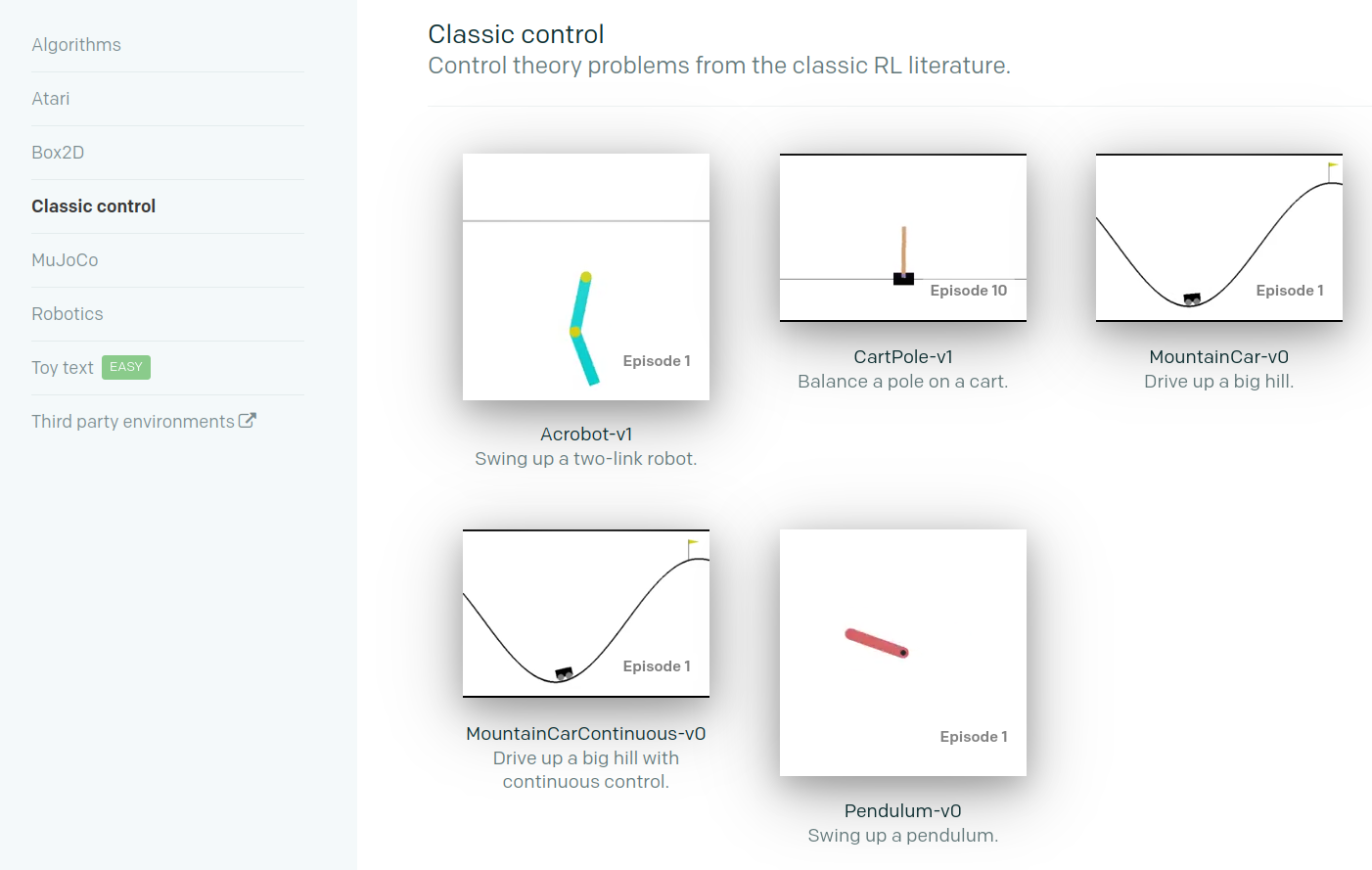
What is Gym? (2/2)
A collection of environments.
RL in Practice: Tips and Tricks
Full video: https://rl-vs.github.io/rlvs2021/tips-and-tricks.html
Today: only about how to define custom task
Defining a custom task
- observation space
- action space
- reward function
- termination conditions
RL 102
Choosing the observation space
- enough information to solve the task
- do not break Markov assumption
- normalize!
CartPole Observation Space
"""
Observation:
Type: Box(4)
Num Observation Min Max
0 Cart Position -4.8 4.8
1 Cart Velocity -Inf Inf
2 Pole Angle -0.418 rad (-24 deg) 0.418 rad (24 deg)
3 Pole Angular Velocity -Inf Inf
"""
high = np.array(
[
self.x_threshold * 2,
np.finfo(np.float32).max,
self.theta_threshold_radians * 2,
np.finfo(np.float32).max,
],
dtype=np.float32,
)
self.observation_space = gym.spaces.Box(low=-high, high=high, dtype=np.float32)
Choosing the Action space
- discrete / continuous
- complexity vs final performance
CartPole Action Space
"""
Actions:
Type: Discrete(2)
Num Action
0 Push cart to the left
1 Push cart to the right
"""
self.action_space = gym.spaces.Discrete(2)
Choosing the reward function
- start with reward shaping
- primary / secondary reward
- normalize!
CartPole Reward
if not done:
reward = 1.0
Termination conditions?
- early stopping
- special treatment needed for timeouts
- should not change the task (reward hacking)
CartPole Termination
done = bool(
x < -self.x_threshold
or x > self.x_threshold
or theta < -self.theta_threshold_radians
or theta > self.theta_threshold_radians
)
# in the registration:
register(
id="CartPole-v1",
entry_point="gym.envs.classic_control:CartPoleEnv",
max_episode_steps=500,
reward_threshold=475.0,
)
Questions?
What's next?
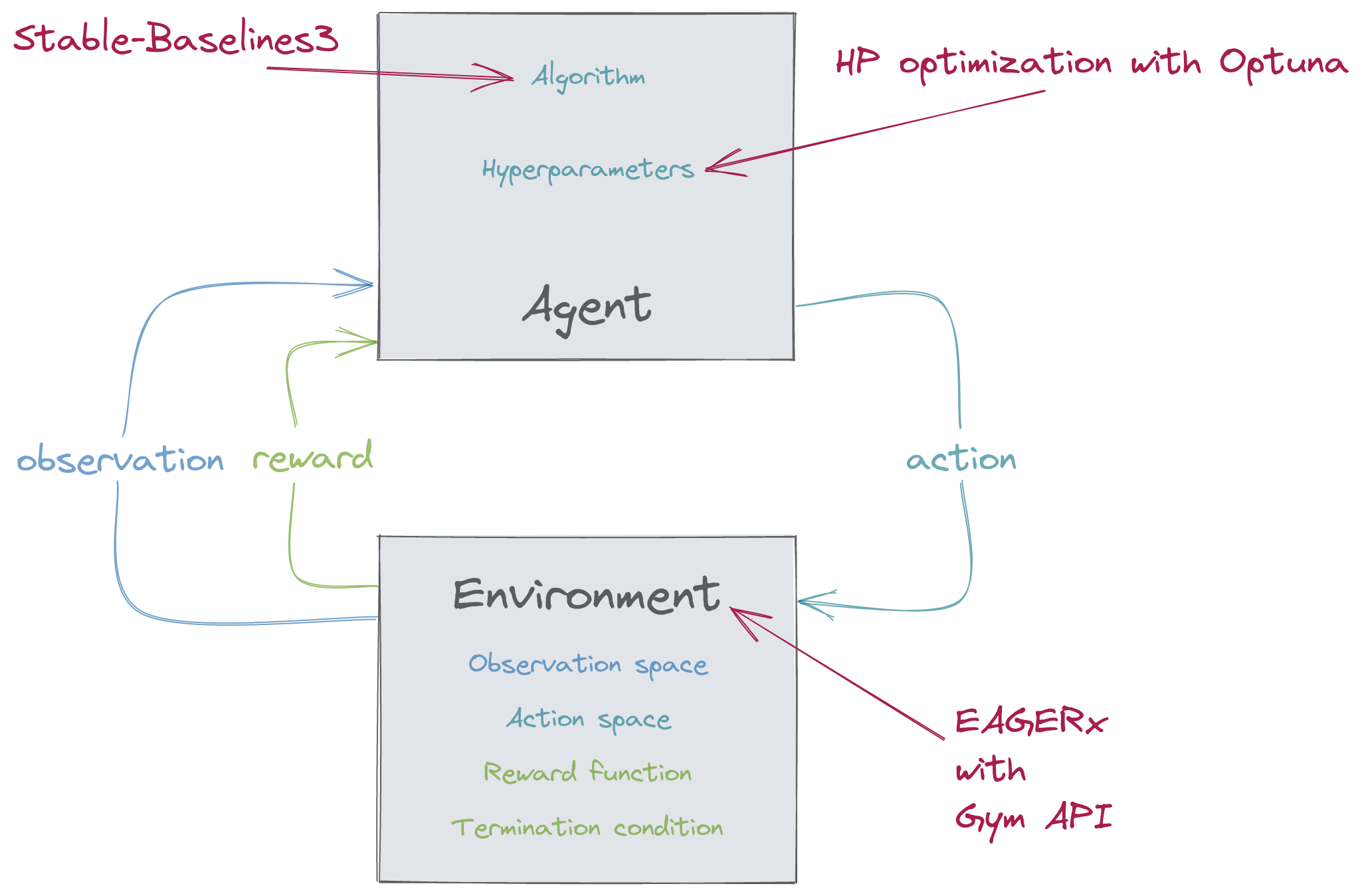
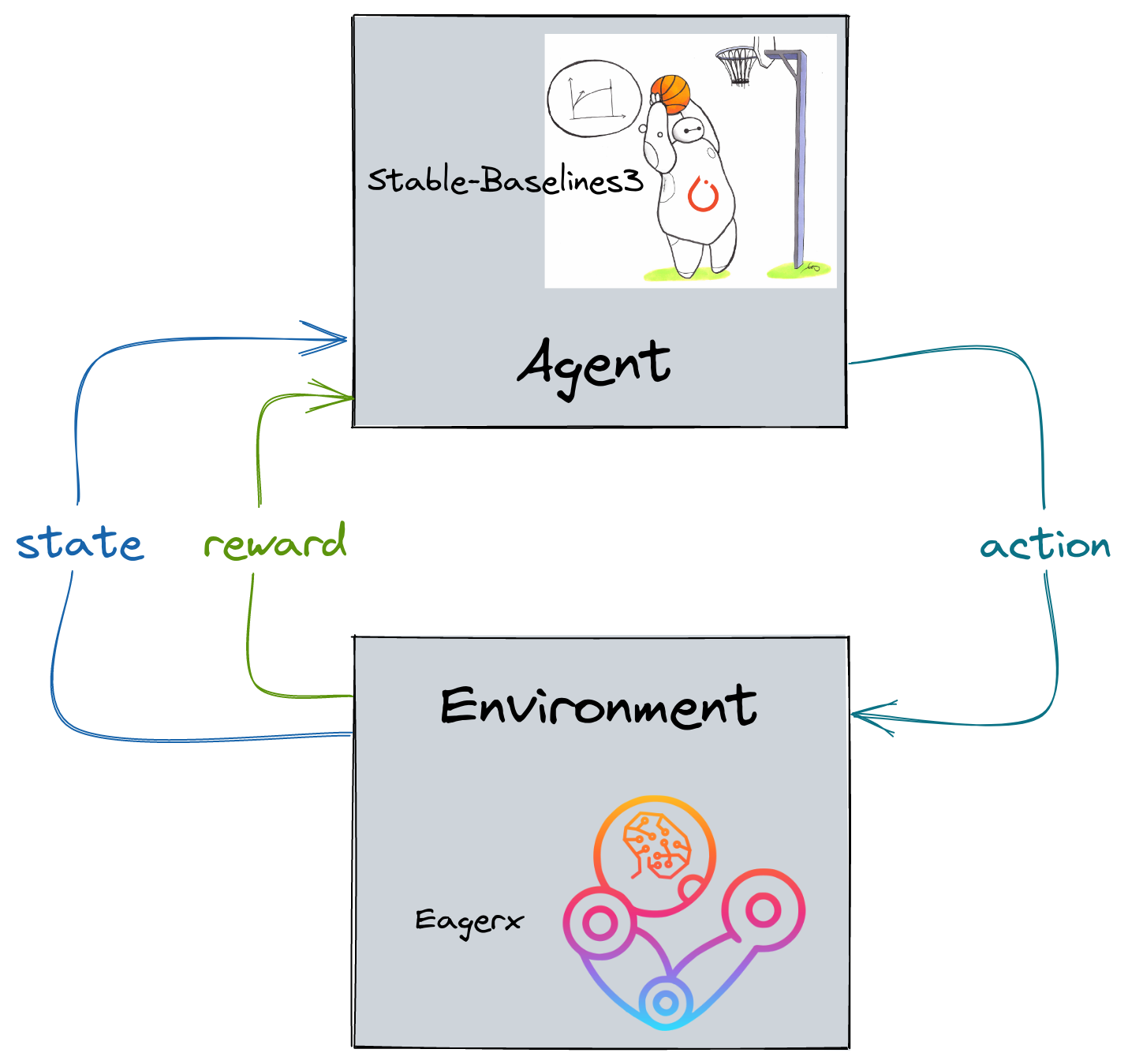
Stable-Baselines3 (SB3)
- reliable implementations of RL algorithms
- user-friendly
- focus on model-free, single-agent RL
- favour readability and simplicity over modularity
Features
- algorithms: A2C, DDPG, DQN, HER, PPO, SAC and TD3
- clean and simple interface
- fully documented
- comprehensive (tensorboard logging, callbacks, ...)
- training framework included (RL Zoo)
- SB3 Contrib: QR-DQN, TQC, TRPO, recurrent PPO, ...
Getting Started
import gym
from stable_baselines3 import SAC
# Train an agent using Soft Actor-Critic on Pendulum-v1
env = gym.make("Pendulum-v1")
model = SAC("MlpPolicy", env, verbose=1)
# Train the model
model.learn(total_timesteps=20_000)
# Save the model
model.save("sac_pendulum")
# Load the trained model
model = SAC.load("sac_pendulum")
# Start a new episode
obs = env.reset()
# What action to take in state `obs`?
action, _ = model.predict(obs, deterministic=True)
Training framework: RL Zoo
- training, loading, plotting, hyperparameter optimization
- W&B integration
- 100+ trained models + tuned hyperparameters
- (soon) Huggingface integration
- (soon) C++ export
# Train an A2C agent on Atari breakout using tuned hyperparameters,
# evaluate the agent every 10k steps and save a checkpoint every 50k steps
python train.py --algo a2c --env BreakoutNoFrameskip-v4 \
--eval-freq 10000 --save-freq 50000
# Plot the learning curve
python scripts/all_plots.py -a a2c -e BreakoutNoFrameskip-v4 -f logs/
Longer hands-on SB3
Full video: https://rl-vs.github.io/rlvs2021/tips-and-tricks.html
Recap
Backup Slides
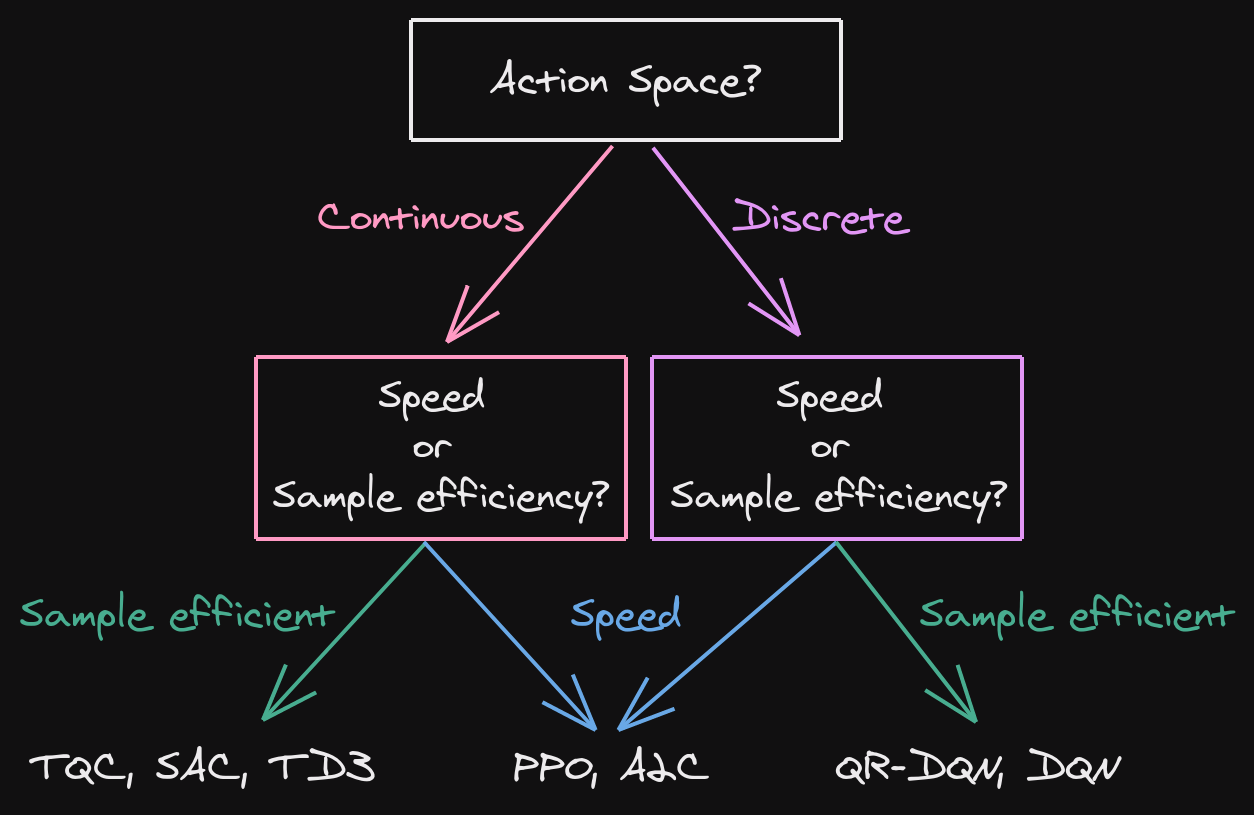
Which algorithm to choose?
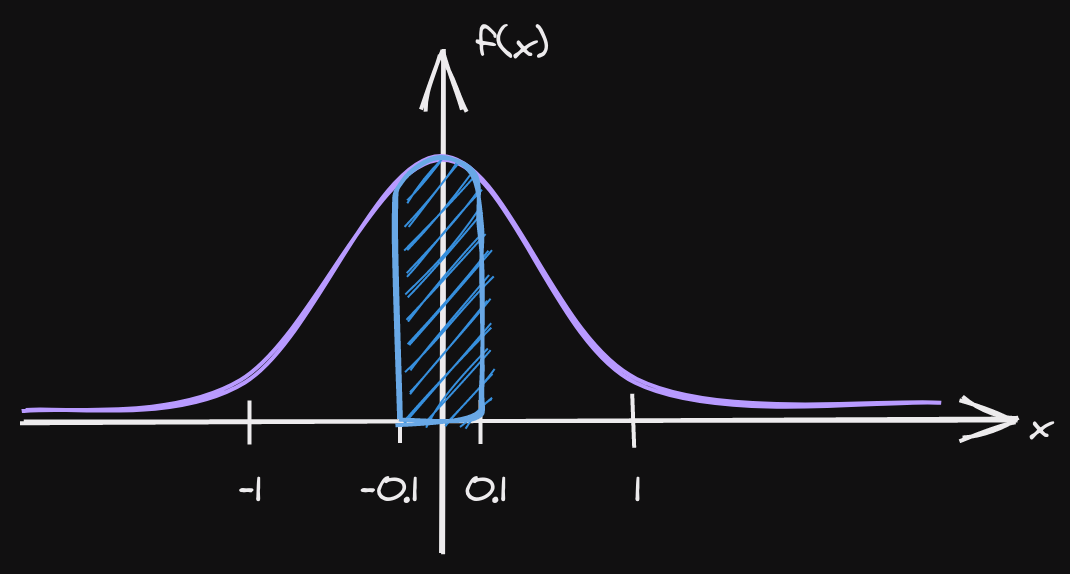
Continuous action space: Normalize? Normalize!
from gym import spaces
# Unnormalized action spaces only work with algorithms
# that don't directly rely on a Gaussian distribution to define the policy
# (e.g. DDPG or SAC, where their output is rescaled to fit the action space limits)
# LIMITS TOO BIG: in that case, the sampled actions will only have values
# around zero, far away from the limits of the space
action_space = spaces.Box(low=-1000, high=1000, shape=(n_actions,), dtype="float32")
# LIMITS TOO SMALL: in that case, the sampled actions will almost
# always saturate (be greater than the limits)
action_space = spaces.Box(low=-0.02, high=0.02, shape=(n_actions,), dtype="float32")
# BEST PRACTICE: action space is normalized, symmetric
# and has an interval range of two,
# which is usually the same magnitude as the initial standard deviation
# of the Gaussian used to sample actions (unit initial std in SB3)
action_space = spaces.Box(low=-1, high=1, shape=(n_actions,), dtype="float32")