Ingredients for Learning Locomotion
Directly on Real Hardware
Boring problems are important

Start simple!

Gall's Law
A complex system that works is invariably found to have evolved from a simple system that worked.
Motivation
Learning directly on real robots
Simulation to reality
In the papers...
Rudin, Nikita, et al. "Learning to walk in minutes using massively parallel deep reinforcement learning." CoRL, 2021.
Simulation to reality (2)
...in reality.

Duclusaud, Marc, et al. "Extended Friction Models for the Physics Simulation of Servo Actuators." (2024)
ISS Experiment (1)

Credit: ESA/NASA
ISS Experiment (2)

Before
After, with the 1kg arm
Can it turn?
Can it still turn?
Additional Video
2nd Mission
Before

After, new arm position + magnet
Challenges of real robot training
- (Exploration-induced) wear and tear
- Sample efficiency
➜ one robot, manual resets - Real-time constraints
➜ no pause, no acceleration, multi-day training - Computational resource constraints
Outline
- Careful Task Design
- Using Prior Knowledge
- Safety Layers
- Robust Hardware
- RL Software
RL 101




RL in Practice: Tips and Tricks - Video

Task design
- Observation space
- Action space
- Reward function
- Termination conditions
Truncations for infinite horizon tasks
truncation vs termination




Example
Timeout: max_episode_steps=4
-
Without truncation handling:
$V_\pi(s_0) = \mathop{\sum^{\textcolor{a61e4d}{3}}_{t=0}}[\gamma^t r_t] = 1 + 1 \cdot 0.98 + 0.98^2 + 0.98^3 \approx 3.9 $ -
With truncation handling:
$V_\pi(s_0) = \mathop{\sum^{\textcolor{green}{\infty}}_{t=0}}[\gamma^t r_t] = \sum^{\textcolor{green}{\infty}}_{t=0}[\gamma^t] = \frac{1}{1 - \gamma} \approx 50 $
Recall: DQN Update
- DQN loss:
\[\begin{aligned} \mathcal{L} = \mathop{\mathbb{E}}[(\textcolor{#a61e4d}{y_t} - \textcolor{#1864ab}{Q_\theta(s_t, a_t)} )^2] \end{aligned} \]
- Regression $ \textcolor{#1864ab}{f_\theta(x)} = \textcolor{#a61e4d}{y}$
with input $\textcolor{#1864ab}{x}$ and target $\textcolor{#a61e4d}{y}$:
- input: $\textcolor{#1864ab}{x = (s_t, a_t)}$
- if $s_{t+1}$ is non terminal: $y = r_t + \gamma \cdot \max_{a' \in A}(Q_\theta(s_{t+1}, a'))$
- if $s_{t+1}$ is terminal: $\textcolor{a61e4d}{y = r_t}$
- if $s_{t+1}$ is truncation: $y = r_t + \gamma \cdot \max_{a' \in A}(Q_\theta(s_{t+1}, a'))$
In Practice

- Careful Task Design
- Using Prior Knowledge
- Safety Layers
- Robust Hardware
- RL Software
Prior knowledge?
- Generality in algo vs specifity in task design
- Reduce search space
- Safer
Example
An Open-Loop Baseline for Reinforcement Learning Locomotion Tasks

Raffin et al. "An Open-Loop Baseline for Reinforcement Learning Locomotion Tasks", RLJ 2024.
Periodic Policy

Cost of generality vs prior knowledge
Leverage Prior Knowledge

Learning to Exploit Elastic Actuators
Raffin et al. "Learning to Exploit Elastic Actuators for Quadruped Locomotion" In preparation, 2023.
- Careful Task Design
- Using Prior Knowledge
- Safety Layers
- Robust Hardware
- RL Software
How not to a break a robot?
1. Hard Constraints, safety layers

Padalkar, Abhishek, et al. "Guiding Reinforcement Learning with Shared Control Templates." ICRA 2023.
Cybathlon Challenge
Quere, Gabriel, et al. "Shared control templates for assistive robotics." ICRA, 2020.
2. Safer Exploration
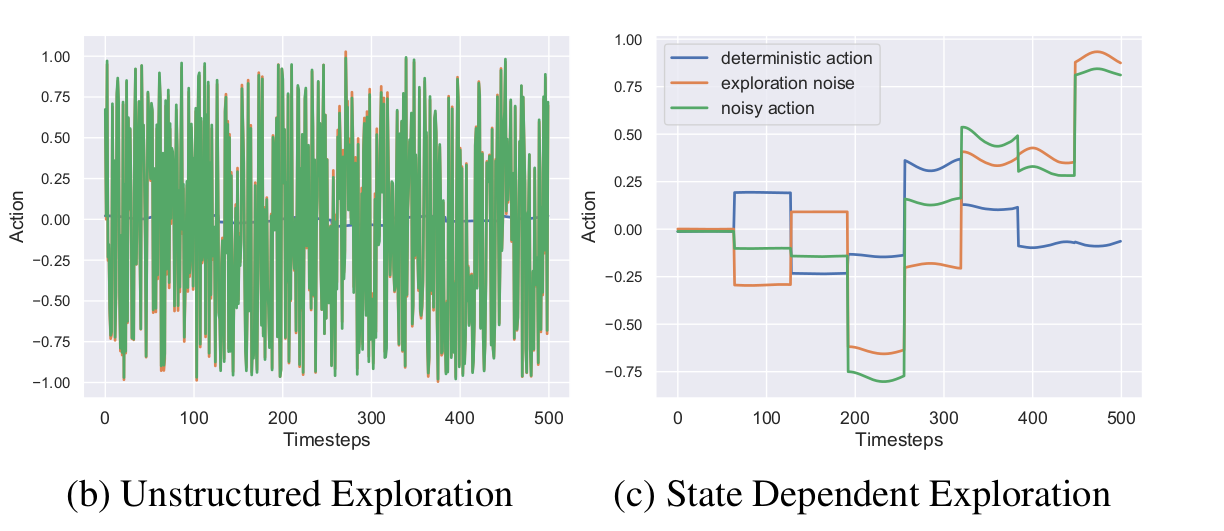
Smooth Exploration for RL
Raffin, Antonin, Jens Kober, and Freek Stulp. "Smooth exploration for robotic reinforcement learning." CoRL. PMLR, 2022.
- Careful Task Design
- Using Prior Knowledge
- Safety Layers
- Robust Hardware
- RL Software
DLR David
MIT Mini-Cheetah
Failures
- Careful Task Design
- Using Prior Knowledge
- Safety Layers
- Robust Hardware
- RL Software
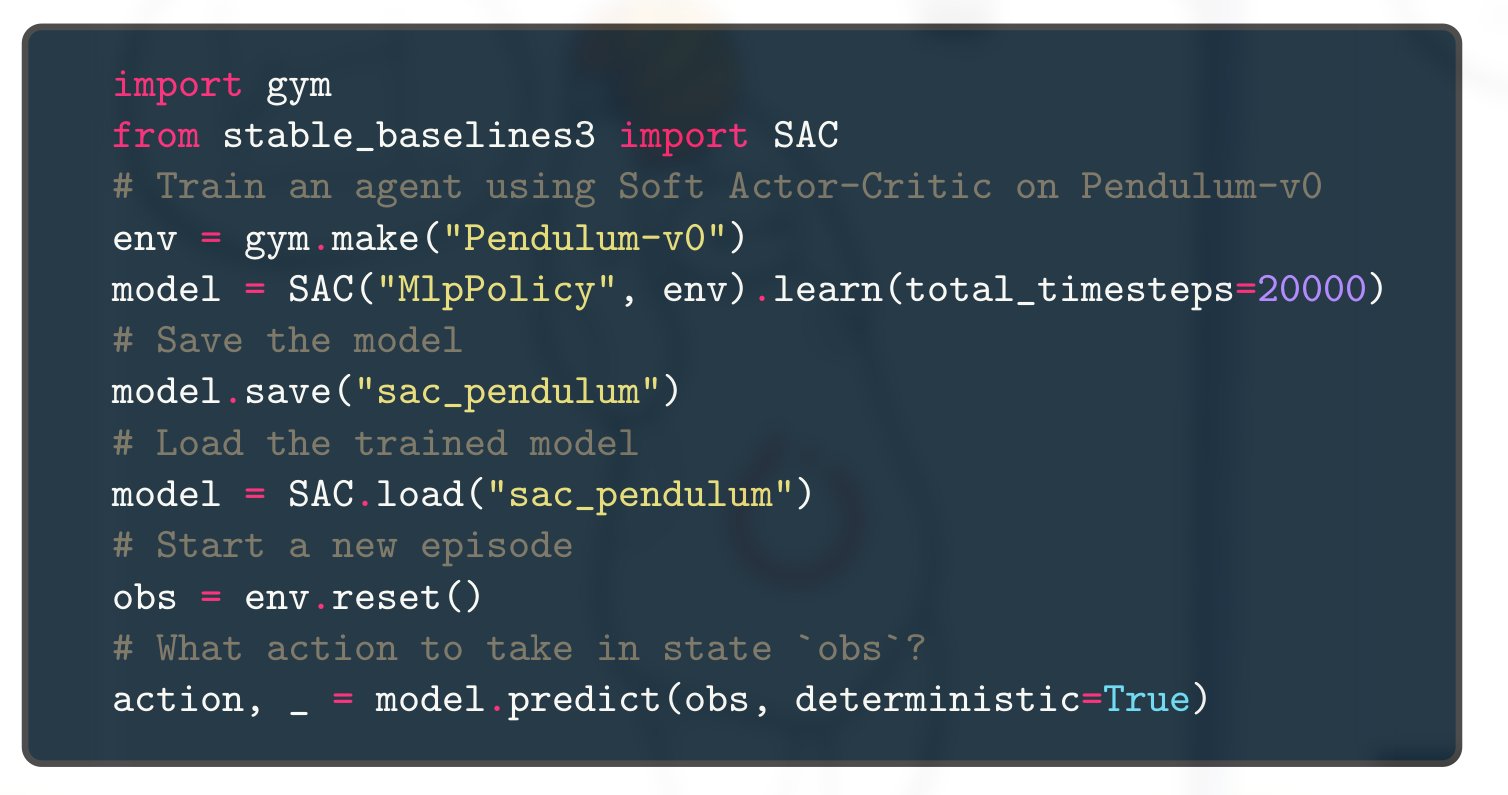
Stable-Baselines3 (SB3)
Reproducible Reliable RL: SB3 + RL Zoo

RL Zoo: Reproducible Experiments
- Training, loading, plotting, hyperparameter optimization
- W&B integration
- 200+ trained models with tuned hyperparameters

Which algorithm to choose?

Recent Advances: Jax and JIT
Up to 20x faster!

Stable-Baselines3 (PyTorch) vs SBX (Jax)
Recent Off-policy RL Algorithms
- TQC: distributional critic
- DroQ: ensembling with dropout, higher replay ratio
- CrossQ: with BN, without target net
- Simba, BRO: bigger, residual net
Recent Advances: DroQ
More gradient steps: 4x more sample efficient!

Also have a look at TQC, TD7 and CrossQ.
RL from scratch in 10 minutes
Using SB3 + Jax = SBX: https://github.com/araffin/sbx
Challenges of real robot training (2)
-
(Exploration-induced) wear and tear
➜ smooth exploration -
Sample efficiency
➜ prior knowledge, recent algorithms -
Real-time constraints
➜ fast implementations, reproducible experiments -
Computational resource constraints
➜ simple controller, deploy with ONNX
Conclusion
- Ingredients for task design
- Leverage prior knowledge
- Safety layers
- Robust hardware
- Reliable and fast software
- Start simple
Questions?
Backup Slides
1. Task Design (action space)

Ex: Controlling tendons forces instead of motor positions
Elastic Neck
Raffin, Antonin, Jens Kober, and Freek Stulp. "Smooth exploration for robotic reinforcement learning." CoRL. PMLR, 2022.
Who am I?
Stable-Baselines

bert

David (aka HASy)
German Aerospace Center (DLR)
Simulation is all you need?
Plotting
python -m rl_zoo3.cli all_plots -a sac -e HalfCheetah Ant -f logs/ -o sac_results
python -m rl_zoo3.cli plot_from_file -i sac_results.pkl -latex -l SAC --rliable

Best Practices for Empirical RL

It doesn't work!
- Start simple/simplify, iterate quickly
- Did you follow the best practices?
- Use trusted implementations
- Increase budget
- Hyperparameter tuning (Optuna)
- Minimal implementation
RL Zoo: Reproducible Experiments
- Training, loading, plotting, hyperparameter optimization
- W&B integration
- 200+ trained models with tuned hyperparameters
In practice
# Train an SAC agent on Pendulum using tuned hyperparameters,
# evaluate the agent every 1k steps and save a checkpoint every 10k steps
# Pass custom hyperparams to the algo/env
python -m rl_zoo3.train --algo sac --env Pendulum-v1 --eval-freq 1000 \
--save-freq 10000 -params train_freq:2 --env-kwargs g:9.8
sac/
└── Pendulum-v1_1 # One folder per experiment
├── 0.monitor.csv # episodic return
├── best_model.zip # best model according to evaluation
├── evaluations.npz # evaluation results
├── Pendulum-v1
│ ├── args.yml # custom cli arguments
│ ├── config.yml # hyperparameters
│ └── vecnormalize.pkl # normalization
├── Pendulum-v1.zip # final model
└── rl_model_10000_steps.zip # checkpoint
Learning to race in an hour
Hyperparameters Study - Learning To Race
