Enabling Reinforcement Learning
on Real Robots

RL 101




Motivation
Learning directly on real robots
Simulation to reality
In the papers...
Rudin, Nikita, et al. "Learning to walk in minutes using massively parallel deep reinforcement learning." CoRL, 2021.
Simulation to reality (2)
...in reality.

Duclusaud, Marc, et al. "Extended Friction Models for the Physics Simulation of Servo Actuators." (2024)
ISS Experiment (1)

Credit: ESA/NASA
ISS Experiment (2)

Before
After, with the 1kg arm
Can it turn?
Can it still turn?
Outdoor
Challenges of real robot training
- (Exploration-induced) wear and tear
- Sample efficiency
➜ one robot, manual resets - Real-time constraints
➜ no pause, no acceleration, multi-day training - Computational resource constraints
Outline
- Reliable Software Tools for RL
- Smooth Exploration
- Integrating Pose Estimation
- Combining Oscillators and RL
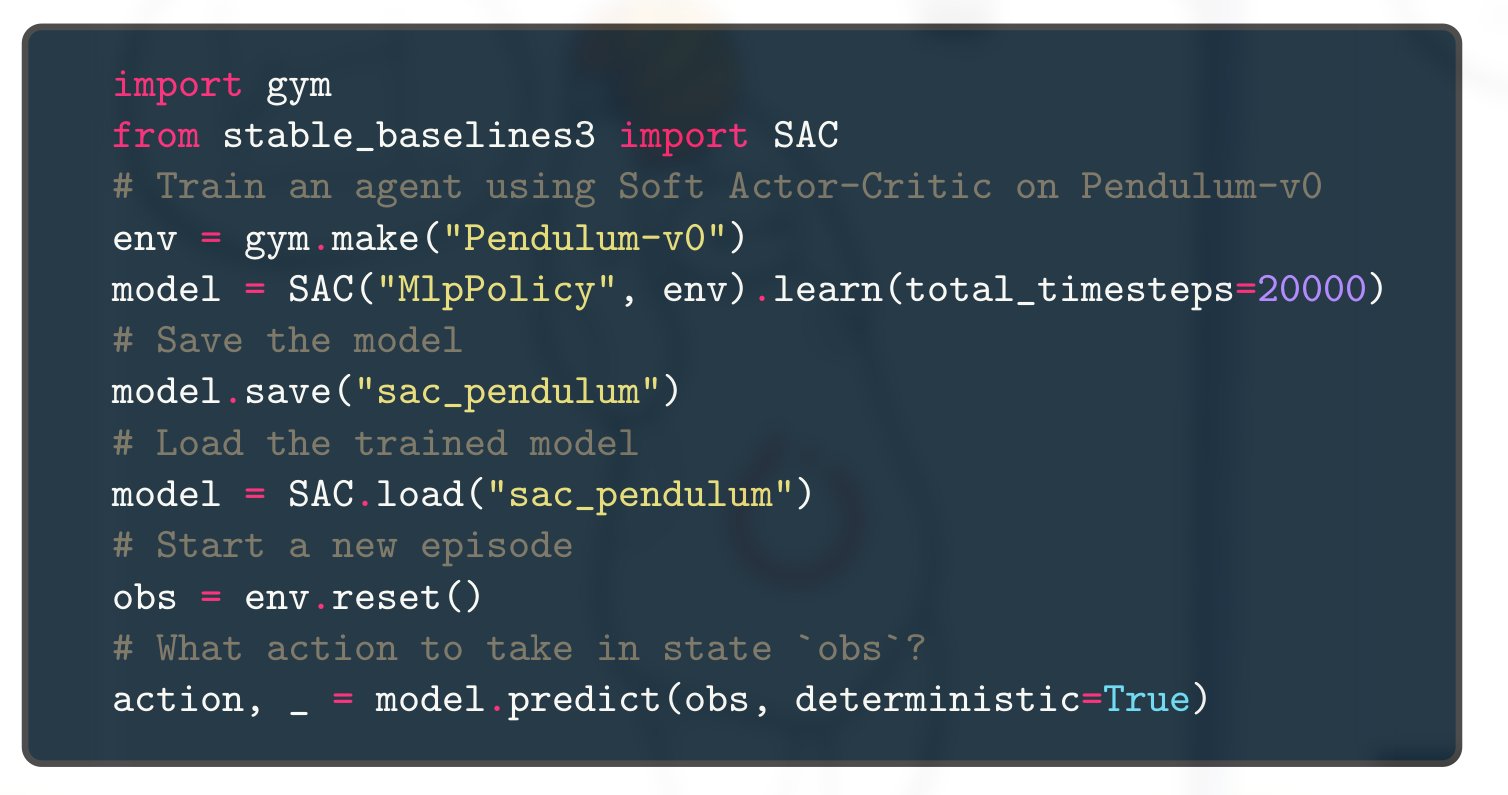
Stable-Baselines3 (SB3)
https://github.com/DLR-RM/stable-baselines3
Raffin, Antonin, et al. "Stable-baselines3: Reliable reinforcement learning implementations." JMLR (2021)
Reliable Implementations?

- Performance checked
- Software best practices (96% code coverage, type checked, ...)
- Active community (9000+ stars, 2700+ citations, 7M+ downloads)
- Fully documented
Reproducible Reliable RL: SB3 + RL Zoo

RL Zoo: Reproducible Experiments
- Training, loading, plotting, hyperparameter optimization
- Everything that is needed to reproduce the experiment is logged
- 200+ trained models with tuned hyperparameters

SBX: A Faster Version of SB3

Stable-Baselines3 (PyTorch) vs SBX (Jax)
Recent Advances: DroQ
More gradient steps: 4x more sample efficient!

RL from scratch in 10 minutes
Using SB3 + Jax = SBX: https://github.com/araffin/sbx
- Reliable Software Tools for RL
- Smooth Exploration
- Integrating Pose Estimation
- Combining Oscillators and RL
Smooth Exploration for Robotic RL
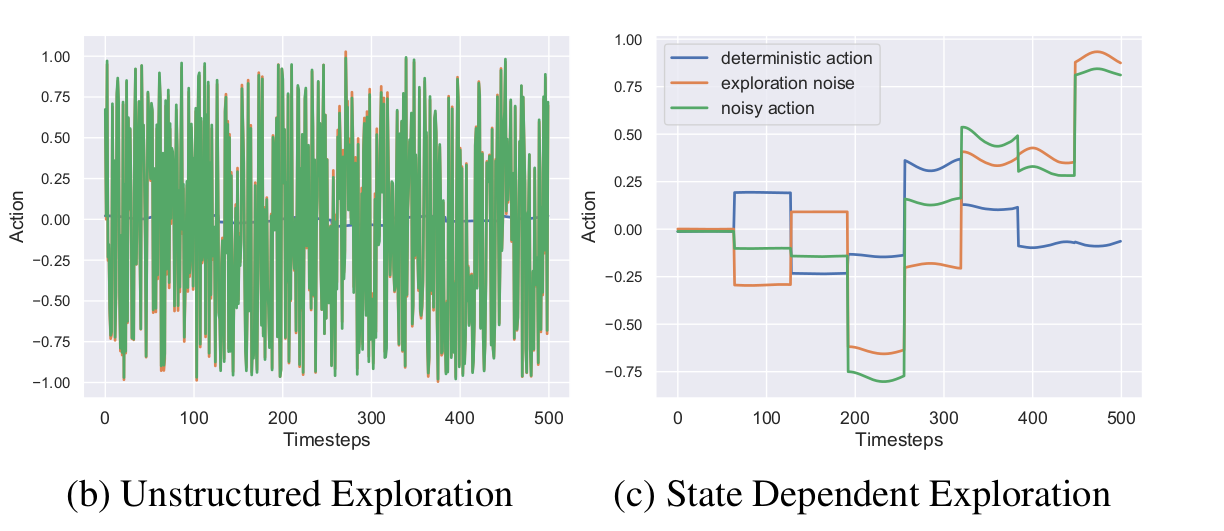
Raffin, Antonin, Jens Kober, and Freek Stulp. "Smooth exploration for robotic reinforcement learning." CoRL. PMLR, 2022.
generalized State-Dependent Exploration (gSDE)
Trade-off between
return and continuity cost

Results
- Reliable Software Tools for RL
- Smooth Exploration
- Integrating Pose Estimation
- Combining Oscillators and RL
Fault-tolerant Pose Estimation

Raffin, Antonin, Bastian Deutschmann, and Freek Stulp. "Fault-tolerant six-DoF pose estimation for tendon-driven continuum mechanisms." Frontiers in Robotics and AI, 2021.
Method
Integrating Pose Estimation with RL

Neck Control Results

Pose Prediction Results
- Reliable Software Tools for RL
- Smooth Exploration
- Integrating Pose Estimation
- Combining Oscillators and RL
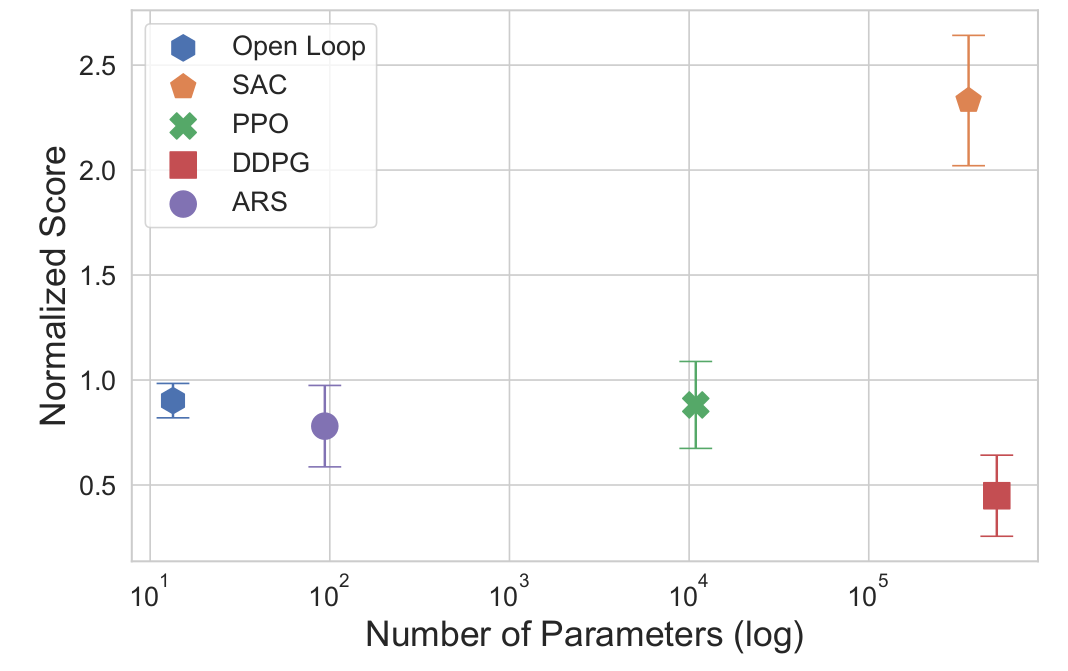
An Open-Loop Baseline for RL Locomotion Tasks

Raffin et al. "An Open-Loop Baseline for Reinforcement Learning Locomotion Tasks", RLJ 2024.
Periodic Policy

Cost of generality vs prior knowledge
Combining Open-Loop Oscillators with RL

Learning to Exploit Elastic Actuators
Raffin et al. "Learning to Exploit Elastic Actuators for Quadruped Locomotion" 2023.
Challenges of real robot training (2)
-
(Exploration-induced) wear and tear
➜ smooth exploration, feedforward controller, open-loop oscillators -
Sample efficiency
➜ prior knowledge, recent algorithms -
Real-time constraints
➜ fast implementations, reproducible experiments -
Computational resource constraints
➜ open-loop oscillators, deploy with ONNX, fast pose estimation
Conclusion
- High quality software
- Safer exploration
- Leverage prior knowledge
- Future: pre-train in sim, fine-tune on real hardware?
Questions?
Backup Slides
Additional Video
2nd Mission
Before

After, new arm position + magnet
Broken leg
Elastic Neck
Raffin, Antonin, Jens Kober, and Freek Stulp. "Smooth exploration for robotic reinforcement learning." CoRL. PMLR, 2022.
Pose Estimation Results


Simulation is all you need?
Parameter efficiency?
Plotting
python -m rl_zoo3.cli all_plots -a sac -e HalfCheetah Ant -f logs/ -o sac_results
python -m rl_zoo3.cli plot_from_file -i sac_results.pkl -latex -l SAC --rliable

RL Zoo: Reproducible Experiments
- Training, loading, plotting, hyperparameter optimization
- W&B integration
- 200+ trained models with tuned hyperparameters
In practice
# Train an SAC agent on Pendulum using tuned hyperparameters,
# evaluate the agent every 1k steps and save a checkpoint every 10k steps
# Pass custom hyperparams to the algo/env
python -m rl_zoo3.train --algo sac --env Pendulum-v1 --eval-freq 1000 \
--save-freq 10000 -params train_freq:2 --env-kwargs g:9.8
sac/
└── Pendulum-v1_1 # One folder per experiment
├── 0.monitor.csv # episodic return
├── best_model.zip # best model according to evaluation
├── evaluations.npz # evaluation results
├── Pendulum-v1
│ ├── args.yml # custom cli arguments
│ ├── config.yml # hyperparameters
│ └── vecnormalize.pkl # normalization
├── Pendulum-v1.zip # final model
└── rl_model_10000_steps.zip # checkpoint
Learning to race in an hour
Hyperparameters Study - Learning To Race
