Recent Advances in RL for Continuous Control

RL 101




Two lines of improvements

Sample efficiency
Ex: real robot, slow simulation

Speed
Ex: fast simulation on GPU, slow algorithm
Outline
- RL 102 (from DQN to SAC)
- Advances in Algorithms
- Advances in Software
- Advances in Simulators
From DQN to SAC (in 10 minutes)
Deep Q-Network (DQN)
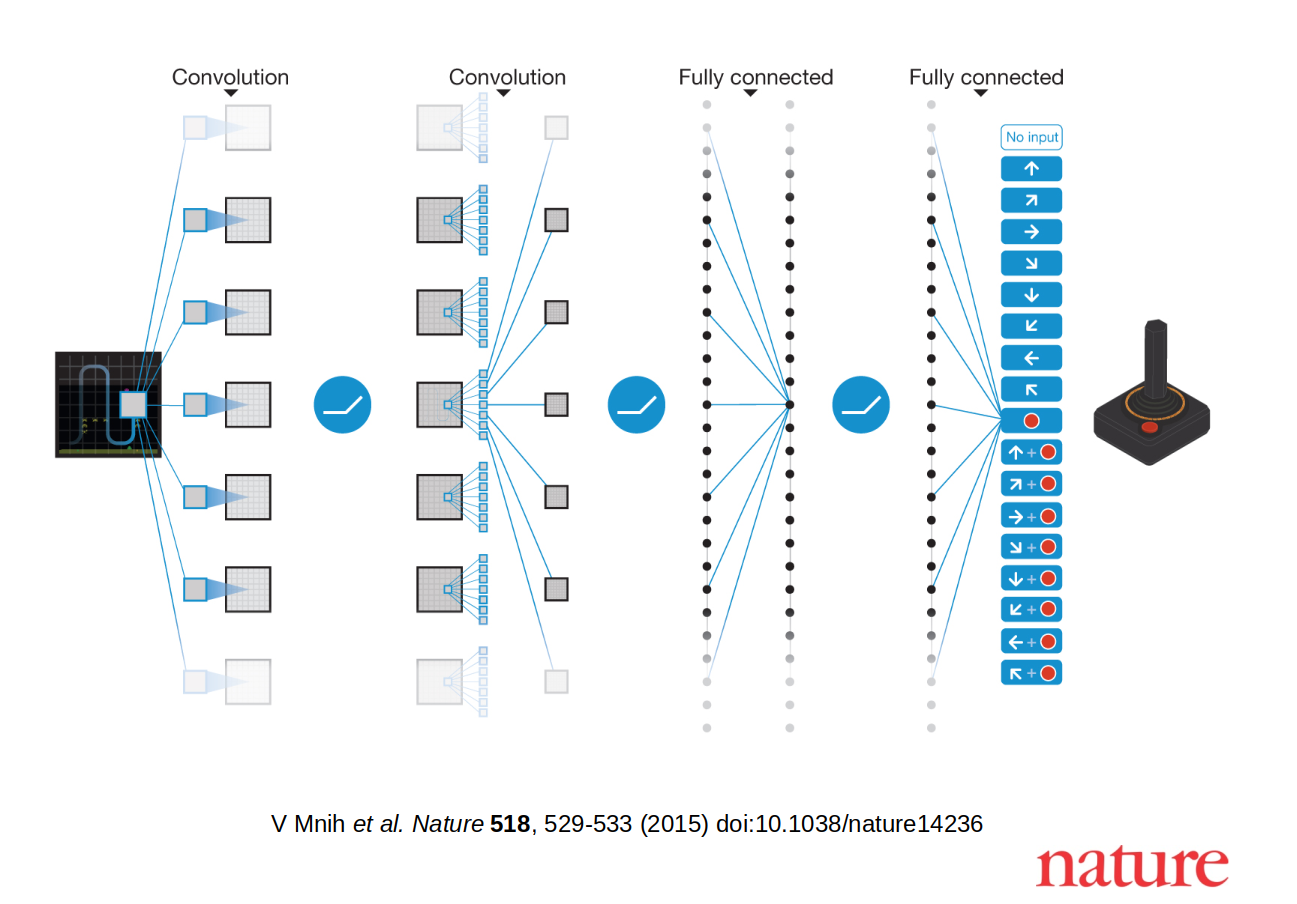
Mnih, Volodymyr, et al. "Playing atari with deep reinforcement learning." (2013).
RL Objective
Maximize the sum of discounted reward
Action-Value Function: $Q$-Value
How good is it to take action $a$ in state $s$?
\[\begin{aligned} \pi(s) = \argmax_{a \in A} Q^\pi(s, a) \end{aligned} \]
DQN Components

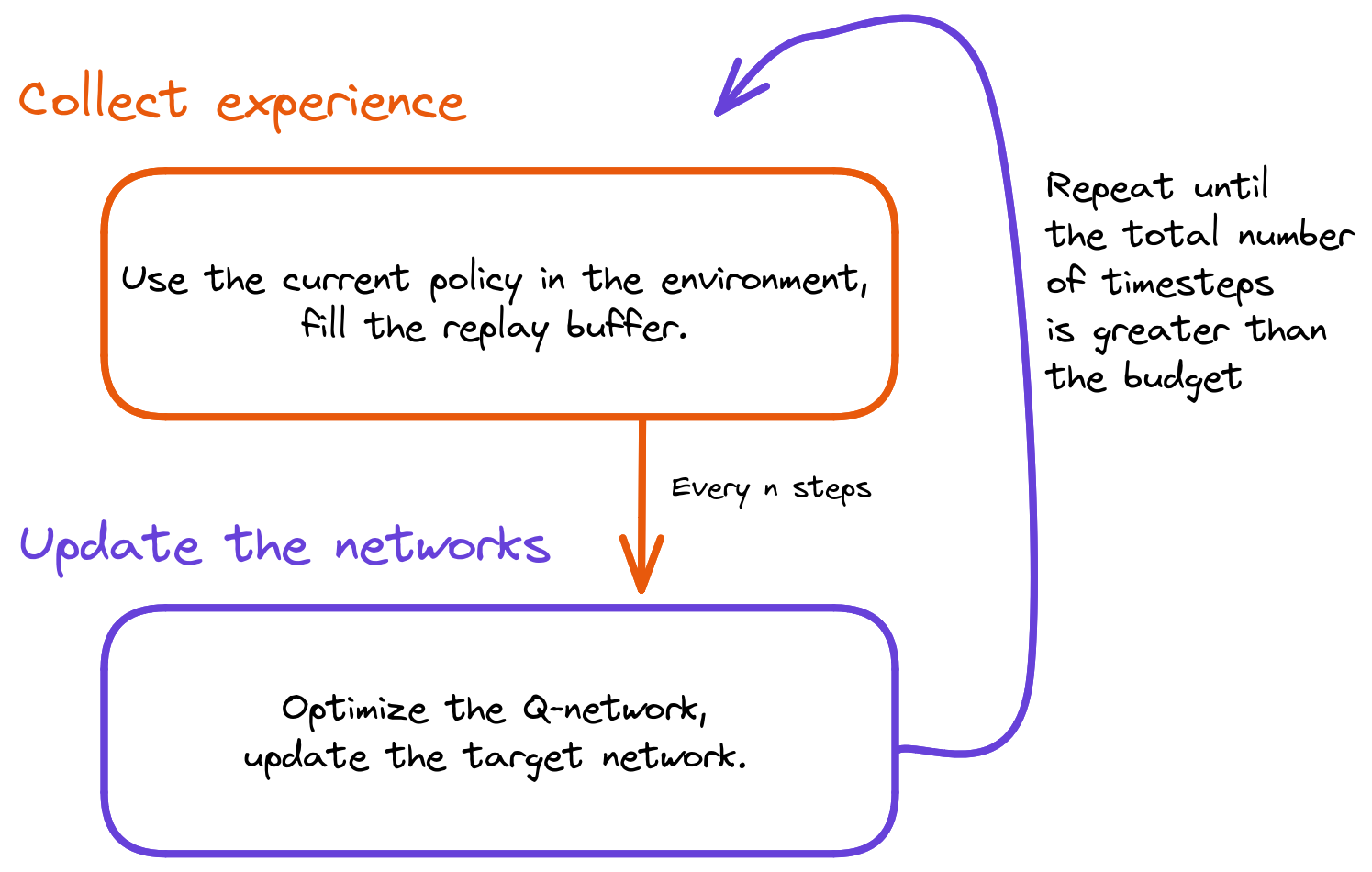
The training loop
Extending DQN to Continuous Actions (DDPG)
Discrete actions: \[\begin{aligned} \pi(s) = \argmax_{a \in A} Q^\pi(s, a) \end{aligned} \]
Learn to maximize the $Q$-function using $\pi_{\phi}$.
Lillicrap, Timothy P., et al. "Continuous control with deep reinforcement learning." (2015).
Deep Deterministic Policy Gradient (DDPG)

Overestimation bias

TD3: select the min of $Q^1_\theta$ and $Q^2_\theta$
Fujimoto, Scott, Herke Hoof, and David Meger. "Addressing function approximation error in actor-critic methods." (2018).
Soft Actor-Critic (SAC)
SAC $\approx$ DQN + DDPG + TD3 + Maximum entropy RL
Maximum entropy RL: encourage exploration while still solving the task
Ex: Avoid the variance of the Gaussian distribution to collapse too early
Haarnoja, Tuomas, et al. "Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor." (2018).
Questions?
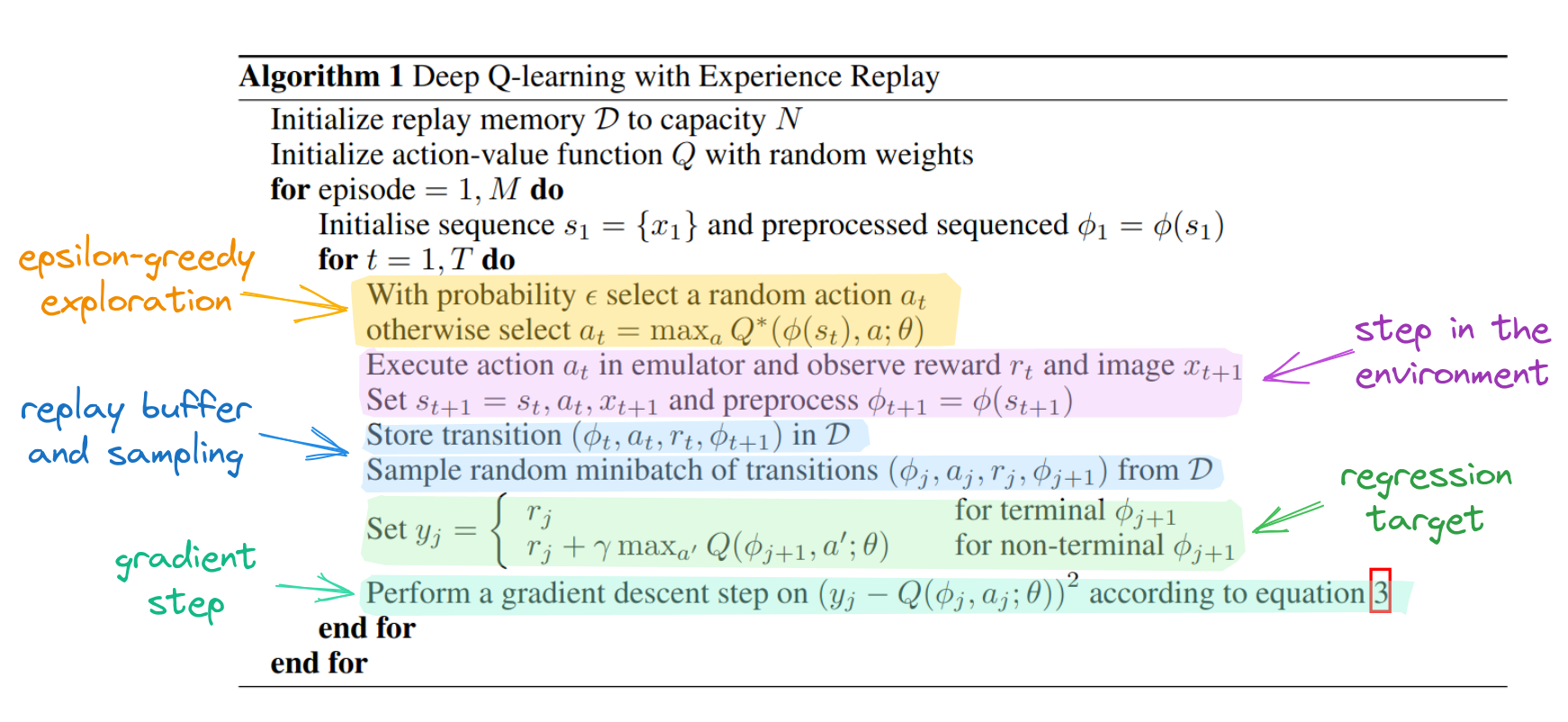
Annotated DQN Algorithm
Outline
- RL 102 (from DQN to SAC)
- Advances in Algorithms
- Advances in Software
- Advances in Simulators
Beyond SAC: TQC, DroQ, SimBa, ...
Stochastic Environments
Same state $s_t$, same action $a_t$, different outcome $r(s_t, a_t)$

Distributional RL

TQC $\approx$ SAC + quantile regression (truncated)
Kuznetsov, Arsenii, et al. "Controlling overestimation bias with truncated mixture of continuous distributional quantile critics." (2020).
TQC Results

Higher replay ratio (REDQ, DroQ)
Idea: re-use samples from the replay buffer more
Issue: Naive scaling doesn't work (overestimation, extrapolation errors, ...)
Solution? explicit (REDQ)/ implicit (DroQ) ensembles, regularization, ...
Chen, Xinyue, et al. "Randomized ensembled double q-learning: Learning fast without a model." (2021).
Hiraoka, Takuya, et al. "Dropout q-functions for doubly efficient reinforcement learning." (2021).
D'Oro, Pierluca, et al. "Sample-efficient reinforcement learning by breaking the replay ratio barrier." (2022).
Hussing, Marcel, et al. "Dissecting deep rl with high update ratios: Combatting value overestimation and divergence." (2024).
$Q$-value Network and Replay Ratio
SAC (RR=1)

Note: policy delay = replay ratio (RR) for both SAC and DroQ
DroQ (RR=20)

Hiraoka, Takuya, et al. "Dropout q-functions for doubly efficient reinforcement learning." (2021).
DroQ Results

RL from scratch in 10 minutes (DroQ)
Using SB3 + Jax = SBX: https://github.com/araffin/sbx
Bigger net (BRO, SimBa, ...)
SAC
SimBa

Lee, Hojoon, et al. "Simba: Simplicity bias for scaling up parameters in deep reinforcement learning." (2024).
Note: can be combined with TQC/DroQ (see also CrossQ, TD7, SimBaV2, ...)
SimBa Results

Questions?
Outline
- RL 102 (from DQN to SAC)
- Advances in Algorithms
- Advances in Software
- Advances in Simulators
JIT compilation

Stable-Baselines3 (PyTorch) vs SBX (Jax)
PyTorch compile: LeanRL(5x boost)
Outline
- RL 102 (from DQN to SAC)
- Advances in Algorithms
- Advances in Software
- Advances in Simulators
Massive Parallel Sim
Thousands of robots in parallel, learn in minutes
Ex: MJX (MuJoCo), Isaac Sim, Genesis, ...
PPO recipe
- Large mini-batch size (6400 - 25600 transitions)
- Bigger network
- KL adaptive learning rate schedule
- Unbounded action space
Optimizing for speed

Conclusion
- More sample-efficient algorithms (TQC, DroQ, ...)
- Faster software (Jax, Torch compile)
- Faster simulators (MJX, Isaac Sim, ...)