Hands-on Session with Stable-Baselines3 (SB3)
Outline
- Stable-Baselines3 Overview
- Questions?
- Hands-on Session
Stable-Baselines3 Overview
History of the project
To fork or not to fork? (2018)




Stable-Baselines?
from stable_baselines import A2C
model = A2C("MlpPolicy", "CartPole-v1")
model.learn(50000)
model.save("a2c_cartpole")
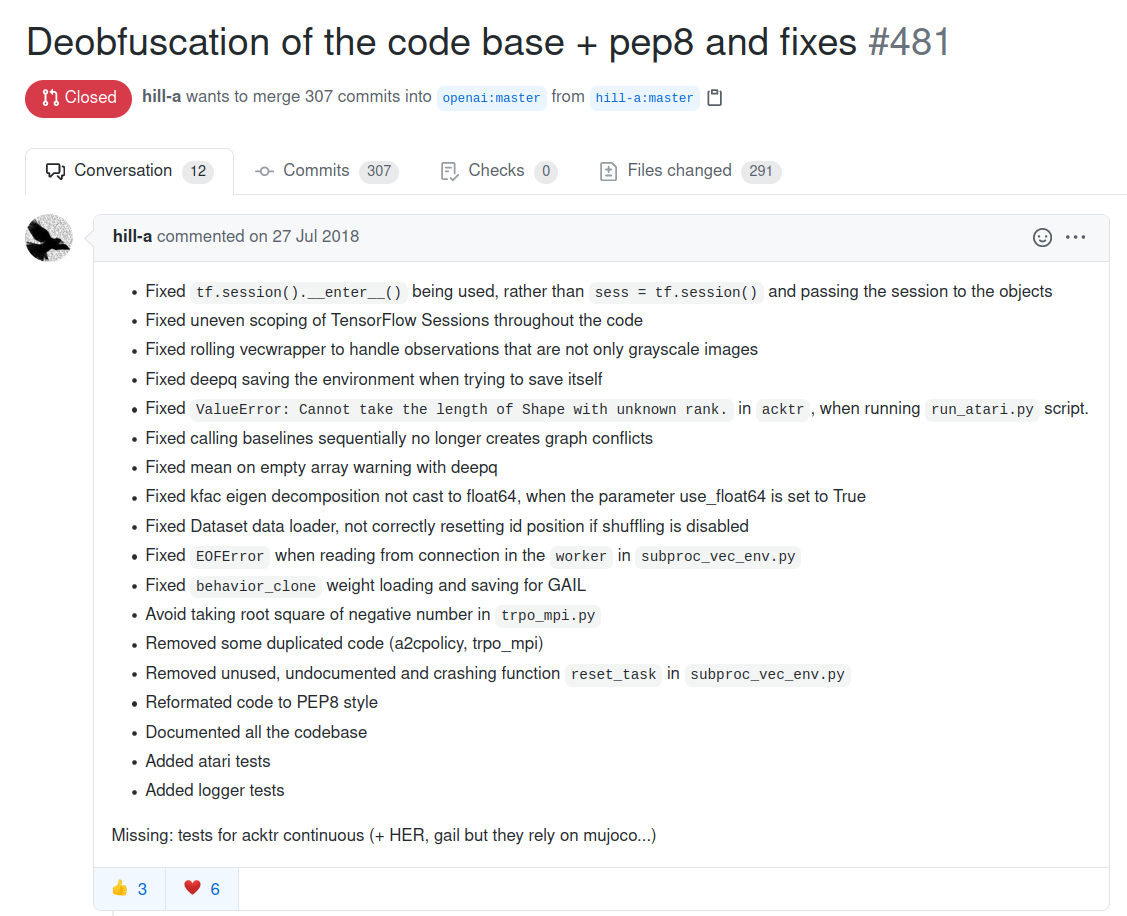
Stable-Baselines (2018-2020)
Ashley Hill, Maximilian Ernestus, Adam Gleave, Anssi Kanervisto
https://github.com/hill-a/stable-baselines
- 5 maintainers
- 60+ contributors
- 1000+ issues / pull requests
- 300+ citations
Stable-Baselines3 (2020-...)
https://github.com/DLR-RM/stable-baselines3
- cleaner codebase but same API
- performance checked
- code coverage: 95%
- active community
Active Community
Stable-Baselines (SB2)

Stable-Baselines3 (SB3)

Design Principles
- reliable implementations of RL algorithms
- user-friendly
- focus on model-free, single-agent RL
- favour readability and simplicity over modularity
Features
- algorithms: A2C, DDPG, DQN, HER, PPO, SAC and TD3
- clean and simple interface
- fully documented
- comprehensive (tensorboard logging, callbacks, ...)
- training framework included (RL Zoo)
- SB3 Contrib: QR-DQN, TQC, ...
Getting Started
import gym
from stable_baselines3 import SAC
# Train an agent using Soft Actor-Critic on Pendulum-v0
env = gym.make("Pendulum-v0")
model = SAC("MlpPolicy", env, verbose=1)
# Train the model
model.learn(total_timesteps=20000)
# Save the model
model.save("sac_pendulum")
# Load the trained model
model = SAC.load("sac_pendulum")
# Start a new episode
obs = env.reset()
# What action to take in state `obs`?
action, _ = model.predict(obs, deterministic=True)
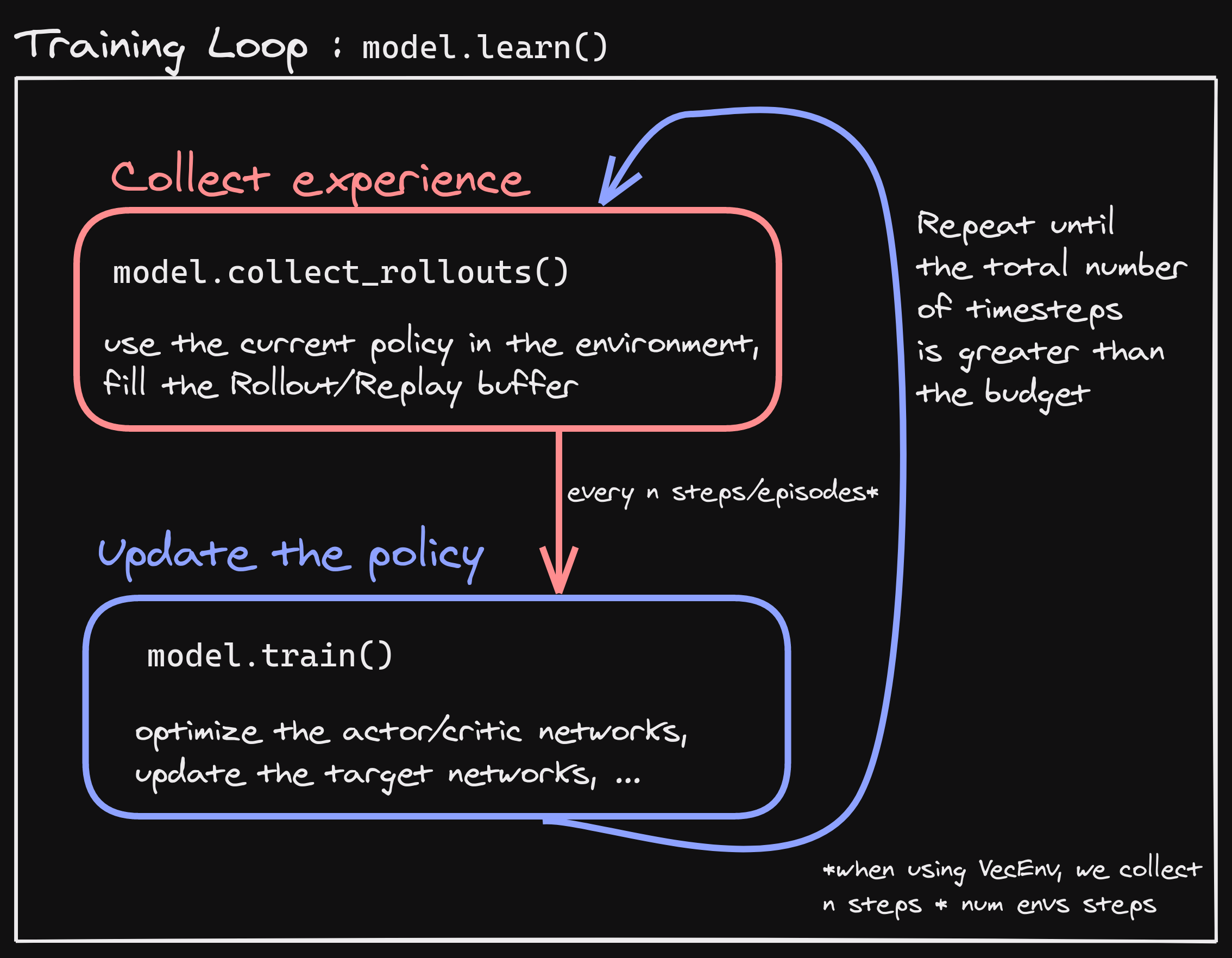
SB3 Training loop
Training framework: RL Zoo
https://github.com/DLR-RM/rl-baselines3-zoo
- training, loading, plotting, hyperparameter optimization
- 100+ trained models + tuned hyperparameters
# Train an A2C agent on Atari breakout using tuned hyperparameters,
# evaluate the agent every 10k steps and save a checkpoint every 50k steps
python train.py --algo a2c --env BreakoutNoFrameskip-v4 \
--eval-freq 10000 --save-freq 50000
# Plot the learning curve
python scripts/all_plots.py -a a2c -e BreakoutNoFrameskip-v4 -f logs/

Recap
- reliable RL implementations
- user-friendly
- training framework (RL Zoo)
Questions?
Upcoming: Hands-on session
https://github.com/araffin/rl-handson-rlvs21
- getting started
- Gym wrappers
- callbacks
- multiprocessing
- importance of hyperparameters
Backup Slides
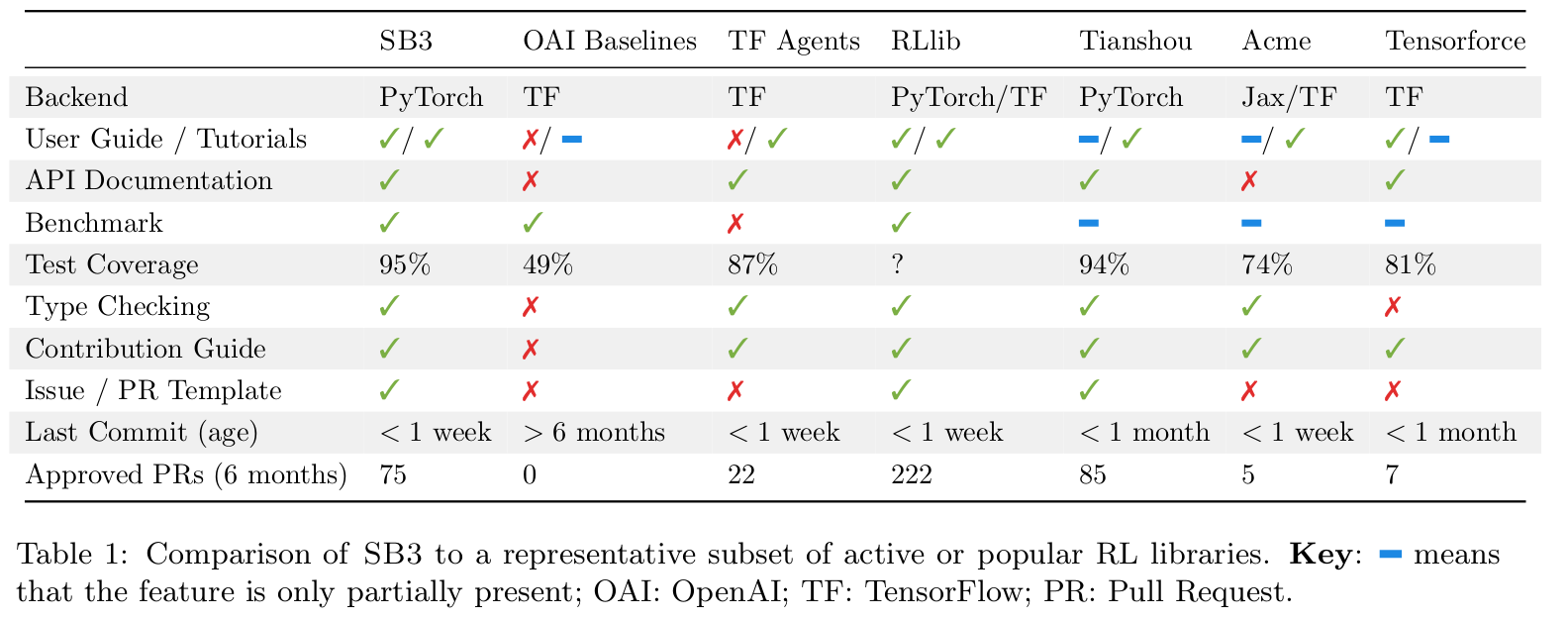
SB3 vs other libs
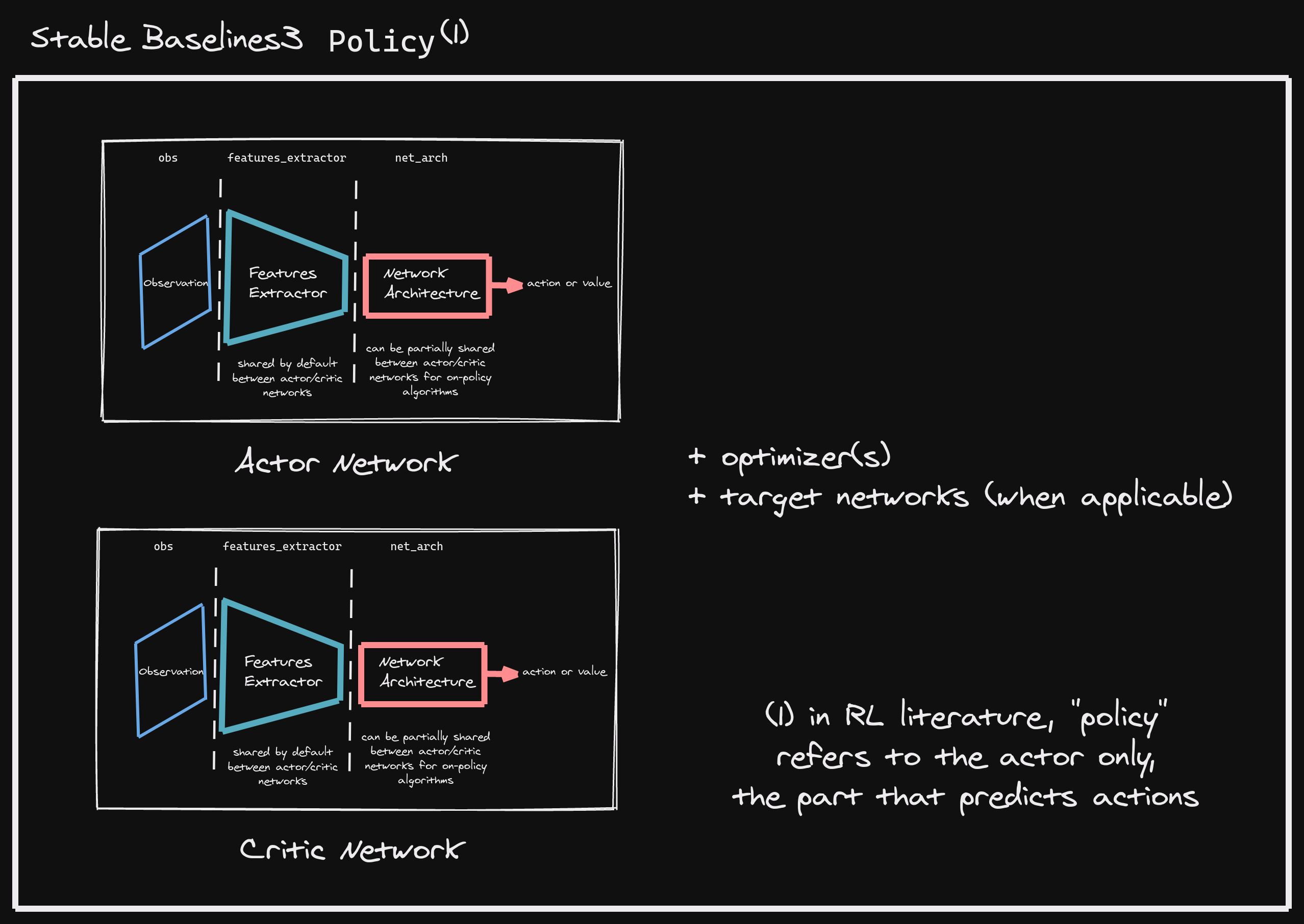
SB3 policy
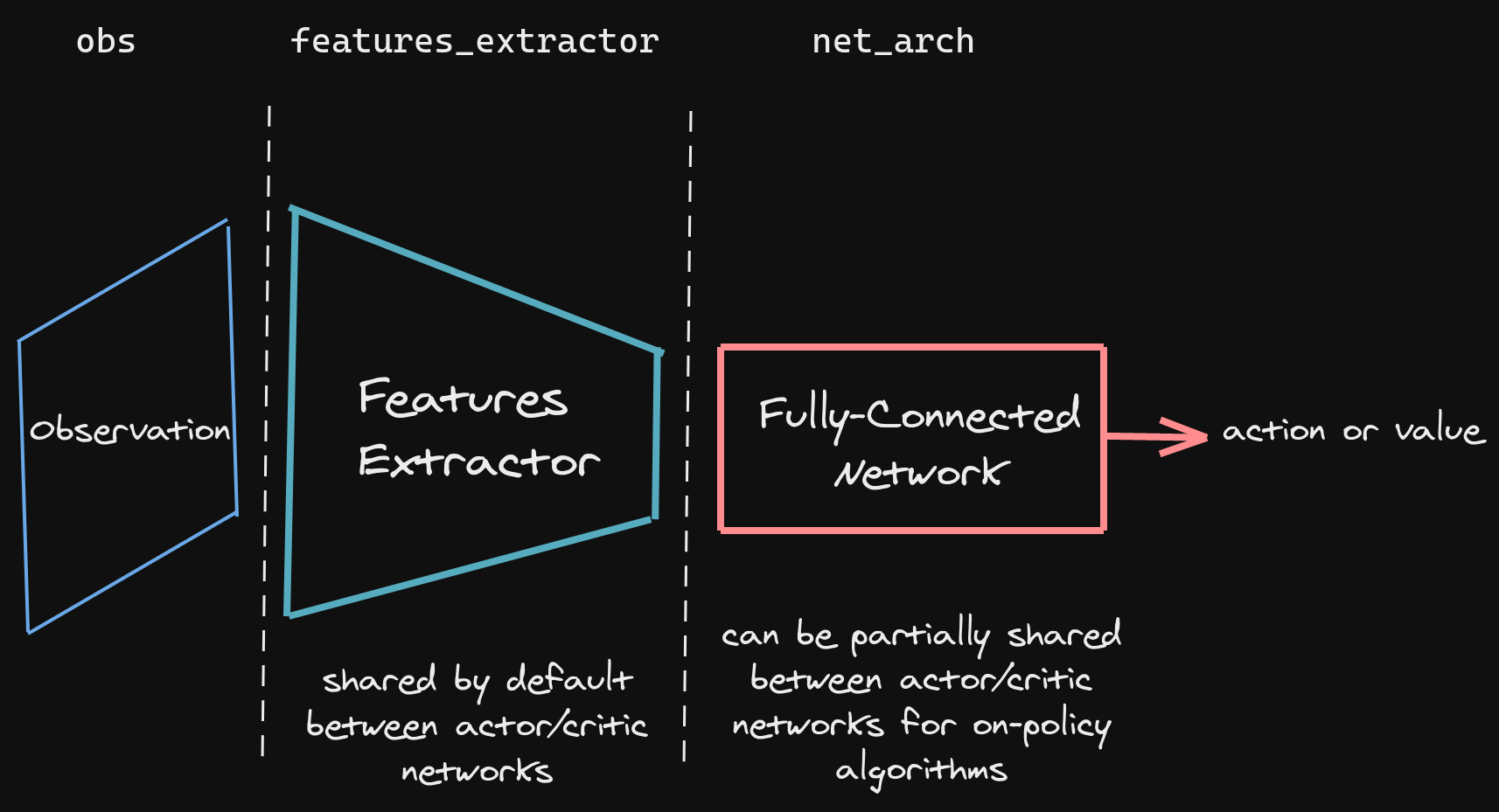
Network Architecture